Alles im Blick und im Griff
Mit einem robotergesteuerten Laser will das Team von MIRACLE II künftig minimalinvasive Operationen an Knochen und Knorpel möglich machen. Dazu hat es ein System aus schlau zusammenarbeitenden Einzelrobotern entwickelt – vom grossen steuerbaren Roboterarm bis zum winzigen endoskopischen Laser-Skalpell. Bereits arbeiten die Forschenden an der Universität und am Universitätsspital Basel an ersten Anwendungen in der Kniechirurgie. Zudem forschen sie an Knochenimplantaten aus dem 3D-Drucker, die minimalinvasiv eingesetzt werden können.
Wer eine Operation über sich ergehen lassen muss, wünscht sich einen möglichst schonenden Eingriff ohne grosse Schnitte. Bei minimalinvasiven Operationen arbeiten die Chirurginnen und Chirurgen mit Endoskopen, die sie von aussen durch kleine Öffnungen in den Körper einführen und bedienen. Danach sind die Patientinnen und Patienten schnell wieder fit. Solch schonende Eingriffe will das MIRACLE-Team künftig auch für Operationen an Knochen möglich machen. Dazu entwickeln die Forschenden an der Universität Basel und am Universitätsspital Basel ein integriertes und intelligentes Robotersystem, das Knochen schonend und sicher mittels eines Lasers schneiden kann.
Die vier Gruppen von MIRACLE II
Das Vorhaben hat in den letzten Jahren vielversprechende Erfolge erzielt, weshalb es nun für weitere sechs Jahre von der Werner Siemens-Stiftung unterstützt wird. Auch MIRACLE II wird von Philippe Cattin geleitet, er ist Professor für Medizinische Bildanalyse und Direktor des Department of Biomedical Engineering (DBE) der Universität und des Universitätsspitals Basel. Cattin steht der Navigationsgruppe des Projekts vor, die 3D-rekonstruierte CT-Bilder für die Operationen bereitstellen soll. Ebenfalls an MIRACLE II beteiligt sind die Lasergruppe, derzeit geleitet von Azhar Zam, und die Robotik-Gruppe von Georg Rauter.
Neu ist der Kliniker Florian Thieringer zum Team dazugestossen; er leitet die Forschungsgruppe «Swiss MAM – Medical Additive Manufacturing» am DBE und arbeitet als Mund-, Kiefer- und Gesichtschirurg am Universitätsspital Basel. Das Schneiden der Knochen ist ja nur der erste Teil einer Knochenoperation, danach muss der defekte Knochen mit einem passenden Implantat repariert werden. Darum sucht die vierte MIRACLE-II-Gruppe «Smart Implants» um den neuen Co-Projektleiter Florian Thieringer nach Wegen, Knochenimplantate individuell an die einzelnen Patientinnen und Patienten anzupassen und sie möglichst minimal-invasiv einzusetzen (siehe Interview).

Der integrierte Roboter
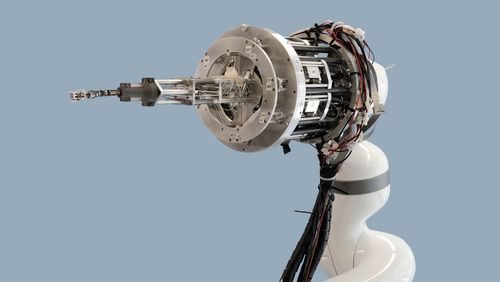
Das Team um den Gruppenleiter Georg Rauter hat es in der ersten Projektphase bereits geschafft, die für das System nötigen neuen Robotik-Komponenten zu entwickeln. In 2021 konnten diese nun zu einem integrierten Robotersystem zusammengefügt werden. Dessen Basis bildet ein etwa 1,5 m langer Roboterarm, der auf einer Führung neben oder über dem Operationstisch montiert wird, sodass er die Körperstelle erreicht, die operiert werden muss. Am Ende des Roboterarms sind die Motoren für die Steuerung der filigranen Komponenten angebracht, die bei der Operation in den Körper eingeführt werden sollen: Das ist zum einen das robotische Endoskop, das durch seine sechs Gelenke extrem beweglich ist und den Laser im Körperinneren an die richtige Stelle bringen wird. Und zum anderen das eigentliche Laser-Skalpell: ein winziger Roboter, der sich mit zwei «Ärmchen» am Knochen festhalten kann, sodass bis auf einen Zehntel Millimeter genaue Schnitte möglich werden.
Auch beim Laser selbst haben die Forschenden schon einiges erreicht. Dieser soll beim Knochenschneiden gleich überprüfen, wie tief er schon geschnitten und ob er Knochen oder weiches Gewebe vor sich hat. Dies haben die Laserphysiker um Gruppenleiter Azhar Zam durch drei verschiedene Laserquellen möglich gemacht: Der eine Laser schneidet, die beiden anderen Laserstrahlen charakterisieren das Gewebe. Die drei Lichtquellen haben die Forschenden durch ein Zusammenspiel von Blenden, Spiegeln und einer steuernden Software miteinander synchronisiert. Im nächsten Schritt wird die Miniaturisierung dieses Systems im Fokus stehen, um die Laserstrahlen schliesslich aus einer kompakten Quelle durch Glasfasern in die Endoskop-Spitze zu leiten.
Erste Anwendungen am Knie
Bereits prüft das MIRACLE-II-Team die Anwendung für Operationen im Knie. «Das Knie ist das grösste Gelenk im Körper mit den dicksten Knochen», erklärt Georg Rauter, Leiter der Robotik-Gruppe. «Darum ist es ein guter Prüfstein: Wenn wir darin Knochen minimalinvasiv schneiden können, dann geht das auch bei anderen Knochen im Körper.» Auch beim Reparieren von Knorpel im Knie könnte das System helfen. Bei der Entwicklung solch konkreter Anwendungen arbeiten die Forschenden unter anderem mit Chirurginnen und Chirurgen des Universitätsspitals Basel zusammen.
Daneben stattet das Team seine Robotik-Komponenten laufend mit neuen Fähigkeiten aus. So kann das Endoskop mittlerweile dank einer winzigen Kamera und einem schlauen Algorithmus automatisch einem bestimmten Punkt folgen. In der Praxis wird dieser Punkt von der Chirurgin oder dem Chirurgen festgelegt werden – etwa für den Fall, dass die Patientin oder der Patient während der Operation bewegt oder angestossen wird. Oder für den Fall, dass das Endoskop denselben Punkt aus einem anderen Winkel betrachten und ihn dabei stets im Fokus behalten soll.

Intuitive Handhabung
Ebenso wichtig wie ein funktionierendes Robotersystem ist aber das Handling – also dass die Fachkräfte im Operationssaal das Robotersystem trotz seiner vielen Bewegungsmöglichkeiten einfach bedienen können, gibt Georg Rauter zu bedenken. Dafür sorgt ein neues intuitives kinematisches System, eine Art interaktiver Griff am Roboter. Im Labor demonstriert Postdoktorand Nicolas Gerig den Gebrauch der Maschine am Operationstisch. Er lenkt das Endoskop mit dem Griff sanft und leicht von der Brust des Skelettmodells, das den menschlichen Körper simuliert, bis hinunter zum linken Knie. Da der Roboterarm stolze 11 kg wiegt, haben die Forschenden eine ausgeklügelte Software eingebaut, die die Messwerte der Kraftsensoren am Griff in die richtigen Manöver übersetzt. Aus eigener Kraft könnte niemand während der Operation die 11 kg bewegen.
Augmented-Reality-Steuerung
Damit nicht genug: Das MIRACLE-II-Team hat den Roboter auch in sein Augmented-Reality-System (AR) integriert. Dieses wurde von der Navigationsgruppe unter der Leitung von Philippe Cattin entwickelt. Es rekonstruiert aus CT-Bildern von Patientinnen und Patienten ein virtuelles 3D-Modell, in das Chirurginnen oder Chirurgen mit einer Datenbrille eintauchen können, um eine Operation zu planen. Künftig sollen diese 3D-Bilder auch direkt während der Operation zum Einsatz kommen. Darum arbeitet Cattin mit seiner Gruppe daran, die dreidimensionalen CT-Bilder mithilfe einer Software automatisch und exakt passend über den Körper der Patientin oder des Patienten auf dem Operationstisch zu projizieren. Und: «Neu lässt sich auch der Roboter direkt aus dieser AR-Umgebung steuern», erläutert Cattin. «Damit haben die Chirurginnen und Chirurgen dann alles auf einmal im Blick: das robotergesteuerte Endoskop, die 3D-rekonstruierten CT-Bilder und natürlich die Patientin oder den Patienten.»
Text: Santina Russo
Fotos: Oliver Lang